【Unitree Go2】自動充電ステーションについて
初めに
本記事では、Go2のオプションで購入可能な自動充電ステーションについてご案内します。
環境
環境は、次のようなものを想定しています。
- 機種: Go2
- 付属自動充電ステーション
1.準備
公式ドキュメントとしては下記ページの最下部にあります。Go2 SDK Development Guide - Payload ドキュメントを見ながらセットアップします。 急速充電器をCharging Pileに接続します。
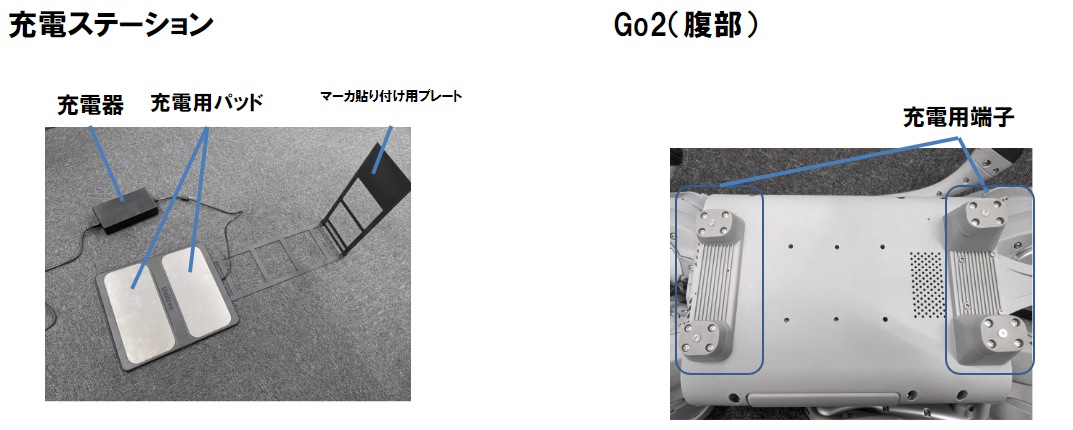
2.充電
電源が入っている状態のGo2をCharging Pileに座らせることで充電を開始することができます。 このとき、Charging PileとGo2の向きが正しいかしっかりと確認をしたうえで行ってください。(逆方向で座らせると故障する可能性があります) 座らせることで自動的に充電を開始します。
- 10分で約9%の充電を行う(Go2が起動している分だけ通常の急速充電よりは充電速度が遅くなる)
- 90%を超えたあたりで充電速度は約10分の1にまで落ちる
- 満充電されると自動的に充電を終了する

おわりに
自動充電ステーション(Charging Pile)の仕様方法を見てきました。
この記事が少しでも役に立てたのなら幸いです。
Related Articles
【Unitree Go2】一問一答FAQ
初めに 本記事では、Unitree Go2を購入されたお客様からよくあるご質問内容を、一問一答形式でまとめたものになります。 一問一答(すべての機種について) Q: Go2を歩かせると、右方向に行くことがあまりにも多いですがこれは正常ですか? A: 初期姿勢が少しずれていると、右に行きやすくなることは他のGo2でも確認されています。初期姿勢が正しいか今一度確認ください。 ...【Unitree Go2】SDK or ROSを使う方法
初めに 本記事では、ユーザー側で用意した外部PCを用いて、SDK(unitree_sdk2)やROS(unitree_ros2)を動かす方法についてご案内します。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの) Docking Station or 外部PC:ubuntu20 / ROS2 foxy 0.参考公式ドキュメント unitree_sdk2 Obtain SDK - Go2 SDK ...【Unitree Go2】SDKの概要について【unitree_sdk2】
初めに Go2 R&Dがついに日本上陸しました。 SDKもGo1の時から大幅アップデートしています。 本記事では、Go2 SDKのexampleの概略についてご案内します。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの) 実行コンピュータ:ubuntu20 ...【Unitree Go2】メーカー資料について
本記事ではGo2のメーカー公式資料等についてご案内します。 (1) スマホアプリ Unitree Go - Google Play Unitree Go - Apple Store app 注意:12/4現在開発中のため、一部動作しない機種がございます。 (2) オンラインSDK資料 R&D(EDU)版について: Go2 SDK Development Guide - UnitreeRobotics R&D(EDU)版githubになります: unitree_sdk2 - github ...【Unitree Go2】Mid360を動かしてみる
初めに 本記事では、オプションのMid360版の動作確認方法を案内します。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの) 付属LiDAR:Mid-360 1.mid360のip設定 ※追記(24/3/29) 最新のMid360をご購入の場合は、メーカー側で以下のLivox Viewerを用いた設定変更が行われているようです。 $ ping 192.168.123.20 ...