【Unitree Go2】Docking Station のインターネット接続方法
初めに
本記事では、Go2 R&D版の背中に搭載されているDocking Station(Jetson Orin)をインターネットに接続する方法についてご案内します。
環境
環境は、次のようなものを想定しています。
- 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの)
- Docking Station: Jetson Orin Nano/NX : ubuntu20 ROS2 foxy
1.USB子機の接続
下記のように、Docking StationにUSBのWi-Fi子機を接続します。
 また、Docking Stationでの設定を行うために、有線接続でCUI上から接続します。
有線LANの接続設定については、【Unitree Go2】外部PCからSDK or ROSを使う方法の1を参考にしてください。
また、Docking Stationでの設定を行うために、有線接続でCUI上から接続します。
有線LANの接続設定については、【Unitree Go2】外部PCからSDK or ROSを使う方法の1を参考にしてください。
2.ドライバのインストール
ドライバ不要のWi-Fi子機を使う場合は、この項はスキップしてください。 ドライバが必要なものを使う場合は、そのWi-Fi子機に付属するドライバをDocking Stationにインストールする必要があります。 例えば、こちら手元にあった弊社所有のWi-Fi子機を使ってインストールした場合は下記のような手順になりました。(使用したものは、EDUP EP-AC1686というものです。参考までに) なお、手順はWi-Fi子機の種類によって異なる場合があります。 手順例: (1) 何らかの方法でDocking Stationにドライバを入れます。
 (2) 次にインストールします。
(2) 次にインストールします。
$ make $ sudo make install3.Wi-Fiに接続
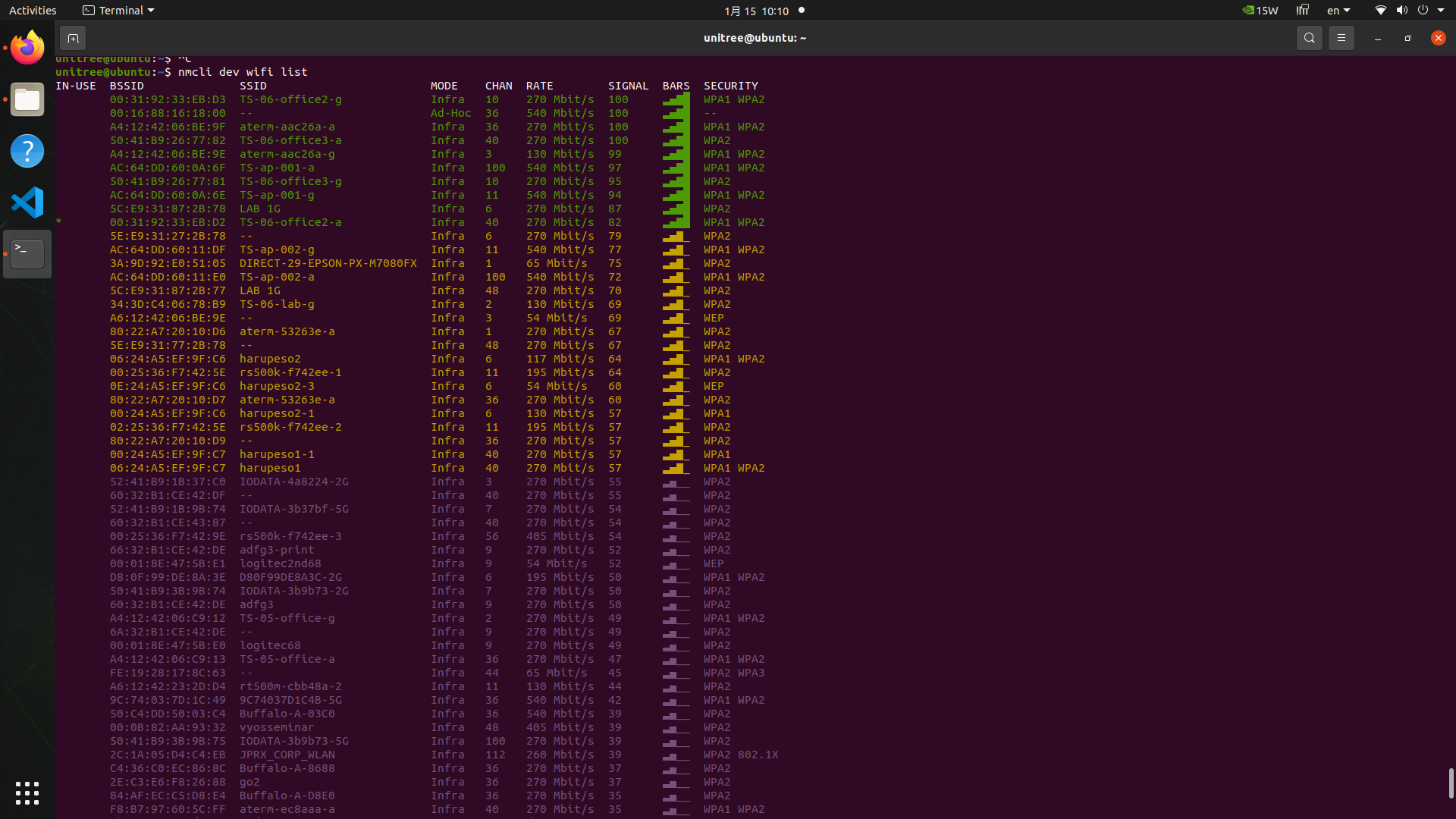
(1) 今までの設定で、Docking Station内で以下のように、wlan0が認識されていることを確認してください。(2) インターネットに接続されたWi-Fiに接続します。
$ nmcli dev wifi list $ sudo nmcli dev wifi connect [SSID] password [password](3) ifconfigコマンドや、ping 8.8.8.8で正しく接続できたか確認できます。(上の画像参照) これでWi-Fiとインターネットに接続できました。
おわりに
Docking Station のインターネット接続方法を見てきました。 Go1の時には必要だったdefaultゲートウェイの設定(参考:【Unitree Go1】Nano/NX のインターネット接続方法)が必要なくなっており、より使いやすくなっていますね。 この記事が少しでも役に立てたのなら幸いです。
Related Articles
【Unitree Go2】NoMachineでDocking StationのGUIを使う
初めに 本記事では、ユーザー側で用意した外部PCからDocking StationのGUIを使う方法を案内します。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの) 外部PC:ディスプレイがあるWindows/Mac/Linux 1.環境設定 何らかの方法でDocking Stationにssh接続します。 有線接続の場合は、【Unitree Go2】外部PCからSDK or ...【Unitree Go2】XT16を動かしてみる
初めに 本記事では、オプションのXT16版の動作確認方法を案内します。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの) 付属LiDAR:XT16 ping 192.168.123.20 1.XT16のip設定 メーカー公式資料Payload - Go2 SDK Development Guideの、LiDARの項目を参考に取り付けを行います。 正しく接続されていれば、DockingStationから $ ...【Unitree Go2】Mid360を動かしてみる
初めに 本記事では、オプションのMid360版の動作確認方法を案内します。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの) 付属LiDAR:Mid-360 1.mid360のip設定 ※追記(24/3/29) 最新のMid360をご購入の場合は、メーカー側で以下のLivox Viewerを用いた設定変更が行われているようです。 $ ping 192.168.123.20 ...【Unitree Go2】Mid360でSLAMを実行する
初めに 本記事では、オプションのMid360版を用いたSLAMの方法を案内します。 今回はFAST-LIOというものを使っていきます。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D+(Edu+)(AIR/PROではないもの) 付属LiDAR:Mid-360 ※FAST-LIOはかなり重いので、Orin NXで行うことを前提とします。 1.mid360のip設定 【Unitree Go2】Mid360を動かしてみる の1の項を見て、接続設定をします。 ...【Unitree Go2】SDK or ROSを使う方法
初めに 本記事では、ユーザー側で用意した外部PCを用いて、SDK(unitree_sdk2)やROS(unitree_ros2)を動かす方法についてご案内します。 環境 環境は、次のようなものを想定しています。 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの) Docking Station or 外部PC:ubuntu20 / ROS2 foxy 0.参考公式ドキュメント unitree_sdk2 Obtain SDK - Go2 SDK ...